



触角是昆虫的主要感觉器官,能够精准感知微小振动、磁场方位、重力方向或化学刺激,其感知灵敏度可与人类皮肤相媲美,甚至在一些特殊功能上超过人类。受此启发,南开大学教授徐文涛团队与日本北海道大学研究团队合作,成功研制出一种神经形态人工触角系统,实现了类似蚂蚁触角传入神经的触觉感知和磁场感知功能。
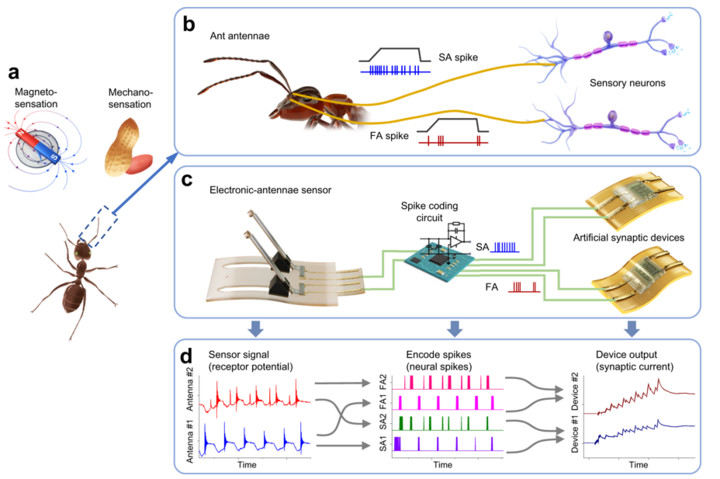
a 蚂蚁触角的触觉感知和磁场感知功能;b 蚂蚁触角神经的形态结构和编码策略;c-d 神经形态人工触角系统的硬件架构和信息流图。
近日,介绍该成果的论文刊登在《自然·通讯》。
昆虫触角感觉器官的结构与功能为新型仿生传感系统的开发提供了设计蓝图,然而,相比于模拟哺乳动物的感觉器官,如何模拟昆虫触角这一高灵敏、多功能的“探测器”,一直是仿生电子领域亟待攻克的难题。
徐文涛团队研制的神经形态人工触角系统模仿了蚂蚁触角传入神经的形态结构、编码策略和感知功能。该系统采用具备三维柔性结构的电子触角传感器,实现了对振动、形变和磁场的高灵敏检测,并利用吸附二维纳米片的柔性人工突触器件实现了对传感信息的类神经处理。传感器阵列和突触器件阵列的连接方式模拟了生物感受器和感觉神经元的架构,传感信号的编码方式模仿了生物机械感受器的脉冲编码策略,最终在神经形态硬件中实现了传感信号时空特征的识别。
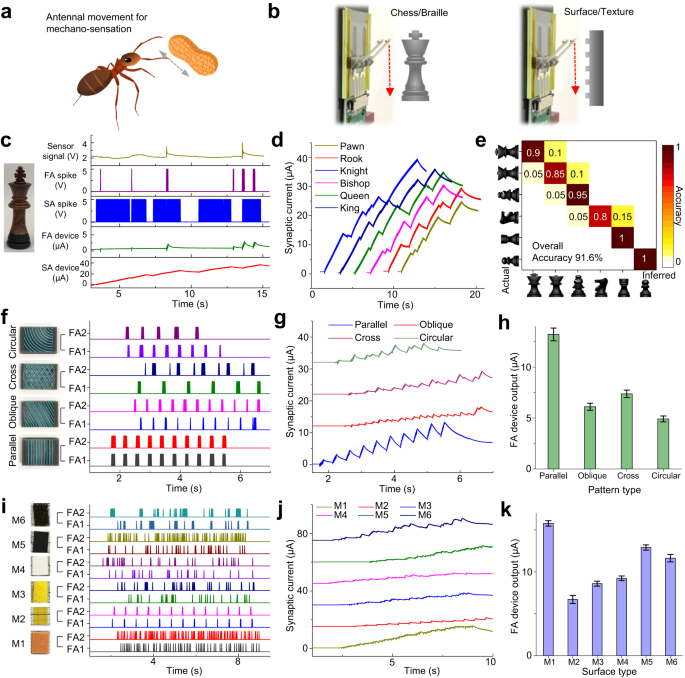
a 蚂蚁触角进行触觉感知的示意图;b 神经形态人工触角系统进行触觉识别的示意图;c-e 国际象棋轮廓识别的结果;f-h 表面图案识别的结果;i-k 材料纹理识别的结果。
实验结果表明,该系统不仅能高效率、低功耗地处理传感数据,还可高灵敏地感知压力、纹理和磁场。通过装载于移动机器人或交互式设备,该系统在轮廓识别、纹理识别、材质分类、磁场导航、非接触交互等多种任务中,均表现出接近或超越人类感知能力的性能。
该工作利用神经形态硬件与仿生传感器模拟了昆虫触角传入神经的感知原理和信息处理机制。《自然·通讯》审稿人评价这项研究“构建了一个完整的仿生感受器”,代表了仿生感知领域的新突破。此项研究对于先进机器人、增强现实、智能交互、柔性电子等领域的发展具有重要意义。
未来,该研究团队计划将软体执行器与神经形态人工触角系统进行集成,以实现感知运动一体化和主动触觉探索功能。(张建新、高雨桐)